【Python】Raspberry Piで赤外線受信
pigpioを使った赤外線受信をPythonで実装してみたので、自分用に内容を記事にしときたいと思います。
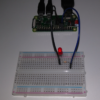
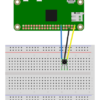
前回の記事で赤外線受信を動かす為の配線を行いましたので、これを動かしていきます。

http://abyz.me.uk/rpi/pigpio/code/irrp_py.zipの赤外線受信のPythonコードを流用して赤外線受信専用にしてます。
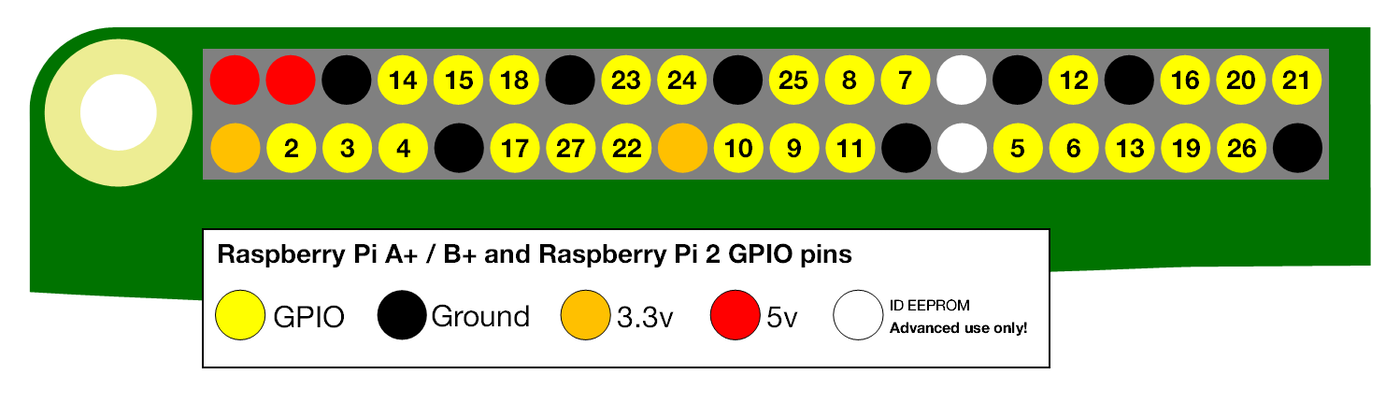
プログラム上で指定するのはピン番号ではなくGPIO番号です。
ラズパイのGPIO番号
プログラムはリモコンの赤外線発信を待機し、受信したら配列のJSONテキストをファイルとして書き出します。
起動して待機状態になったら、リモコンを受信部分に向けてボタンを押します。
処理が完了したらOkayのログが表示されます。
import time
import json
import os
import argparse
import pigpio
GPIO = 17
FILE = "recv.txt"
GLITCH = 100
PRE_MS = 200
POST_MS = 150
FREQ = 38
VERBOSE = False
SHORT = 10
GAP_MS = 100
TOLERANCE = 15
POST_US = POST_MS * 1000
PRE_US = PRE_MS * 1000
GAP_S = GAP_MS / 1000.0
TOLER_MIN = (100 - TOLERANCE) / 100.0
TOLER_MAX = (100 + TOLERANCE) / 100.0
last_tick = 0
in_code = False
code = []
fetching_code = False
def normalise(c):
if VERBOSE:
print("before normalise", c)
entries = len(c)
p = [0]*entries # Set all entries not processed.
for i in range(entries):
if not p[i]: # Not processed?
v = c[i]
tot = v
similar = 1.0
# Find all pulses with similar lengths to the start pulse.
for j in range(i+2, entries, 2):
if not p[j]: # Unprocessed.
if (c[j]*TOLER_MIN) < v < (c[j]*TOLER_MAX): # Similar.
tot = tot + c[j]
similar += 1.0
# Calculate the average pulse length.
newv = round(tot / similar, 2)
c[i] = newv
# Set all similar pulses to the average value.
for j in range(i+2, entries, 2):
if not p[j]: # Unprocessed.
if (c[j]*TOLER_MIN) < v < (c[j]*TOLER_MAX): # Similar.
c[j] = newv
p[j] = 1
if VERBOSE:
print("after normalise", c)
def compare(p1, p2):
if len(p1) != len(p2):
return False
for i in range(len(p1)):
v = p1[i] / p2[i]
if (v < TOLER_MIN) or (v > TOLER_MAX):
return False
for i in range(len(p1)):
p1[i] = int(round((p1[i]+p2[i])/2.0))
if VERBOSE:
print("after compare", p1)
return True
def tidy_mark_space(records, base):
ms = {}
# Find all the unique marks (base=0) or spaces (base=1)
# and count the number of times they appear,
rl = len(records)
for i in range(base, rl, 2):
if records[i] in ms:
ms[records[i]] += 1
else:
ms[records[i]] = 1
if VERBOSE:
print("t_m_s A", ms)
v = None
for plen in sorted(ms):
if v == None:
e = [plen]
v = plen
tot = plen * ms[plen]
similar = ms[plen]
elif plen < (v*TOLER_MAX):
e.append(plen)
tot += (plen * ms[plen])
similar += ms[plen]
else:
v = int(round(tot/float(similar)))
# set all previous to v
for i in e:
ms[i] = v
e = [plen]
v = plen
tot = plen * ms[plen]
similar = ms[plen]
v = int(round(tot/float(similar)))
# set all previous to v
for i in e:
ms[i] = v
if VERBOSE:
print("t_m_s B", ms)
rl = len(records)
for i in range(base, rl, 2):
records[i] = ms[records[i]]
def tidy(records):
tidy_mark_space(records, 0) # Marks.
tidy_mark_space(records, 1) # Spaces.
def end_of_code():
global code, fetching_code
if len(code) > SHORT:
normalise(code)
fetching_code = False
else:
code = []
print("Short code, probably a repeat, try again")
def cbf(gpio, level, tick):
global last_tick, in_code, code, fetching_code
if level != pigpio.TIMEOUT:
edge = pigpio.tickDiff(last_tick, tick)
last_tick = tick
if fetching_code:
if (edge > PRE_US) and (not in_code): # Start of a code.
in_code = True
pi.set_watchdog(GPIO, POST_MS) # Start watchdog.
elif (edge > POST_US) and in_code: # End of a code.
in_code = False
pi.set_watchdog(GPIO, 0) # Cancel watchdog.
end_of_code()
elif in_code:
code.append(edge)
else:
pi.set_watchdog(GPIO, 0) # Cancel watchdog.
if in_code:
in_code = False
end_of_code()
pi = pigpio.pi() # Connect to Pi.
if not pi.connected:
exit(0)
try:
f = open(FILE, "r")
records = json.load(f)
f.close()
except:
records = []
pi.set_mode(GPIO, pigpio.INPUT) # IR RX connected to this GPIO.
pi.set_glitch_filter(GPIO, GLITCH) # Ignore glitches.
cb = pi.callback(GPIO, pigpio.EITHER_EDGE, cbf)
# Process each id
print("Recording")
print("Press remote control key")
code = []
fetching_code = True
while fetching_code:
time.sleep(0.1)
print("Okay")
time.sleep(0.5)
records = code[:]
pi.set_glitch_filter(GPIO, 0) # Cancel glitch filter.
pi.set_watchdog(GPIO, 0) # Cancel watchdog.
tidy(records)
f = open(FILE, "w")
f.write(json.dumps(records, sort_keys=True).replace("],", "],\n")+"\n")
f.close()
pi.stop() # Disconnect from Pi.
実行結果
実行結果コンソール(一部)
Recording
Press remote control key
Okay
recv.txtの中に赤外線受信した内容が保存されます。
元のPythonコードが出来上がっているので、いちいち改変しなくても良いのですが、このコードを流用して汎用的なことをできるようにしたかったので、ある程度処理の流れだけでもつかむために改変しました。ちょっとでも弄っておくと後で応用しやすくなるんでね。
関連記事